Технология компенсации неровностей поля Т2
|
|

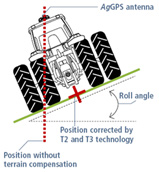
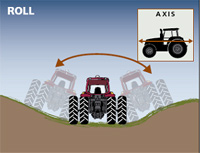
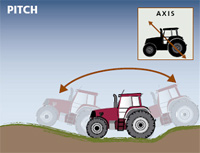
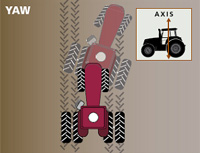
 | При движении по неровным полям с высокой точностью, необходимо корректировать ошибки, вызванные наклоном транспортного средства. Для этих целей была разработана технология компенсация неровности поля Т2. Контроллер EZ- Steer с технологией Т2 имеет встроенный датчик, определяющий угол и скорость изменения:
|
Поведение навигационной системы без технологии компенсации неровностей поля T2
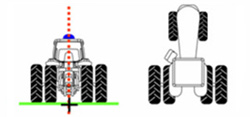
На ровных полях координаты антенны точно соответствуют положению трактора.
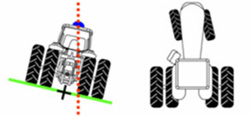
При движении по наклонной поверхности координаты антенны отличаются от положения трактора. Навигационная система считает, что произошло отклонение от траектории и поворачивает трактор.
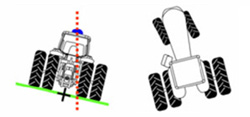
Трактор отклоняется от заданной траектории.
|
|
|